Minkowski plane vs. hyperbolic plane
As a physics student, I have studied some elements about hyperbolic geometry in many different contexts.
In linear algebra, I was told that equipping $\mathbb{R}^2$ with a non-degenerate symmetric bilinear form gives us a space isometric to the euclidean plane, the hyperbolic plane or the anti-euclidean plane (iff the bilinear form has signature $(+,+)$, $(+,-)$ or $(-,-)$ respectively).
It was discussing this that I was first given the definitions of euclidean\hyperbolic angle and the euclidean\hyperbolic rotation. A hyperbolic rotation was just a transformation that left the 'product' (the operation defined by the bilinear form) of any two vectors invariant.
Later on, when being introduced to some concepts about differential geometry in multivariable calculus, I was told that the geometry of a hyperbolic paraboloid (a saddle-like surface) is hyperbolic because it is negatively curved.
I don't see how these two definitions of hyperbolic geometry relate to one another. In the first one, it didn't seem to make sense to talk about curvature nor euclidean angles – only hyperbolic angles made sense –, but in the second case one we were given the example of a triangle living in the saddle and we were told that its angles (euclidean angles) add up to less than $\pi$ radians because it's negatively curved.
I tried computing the first fundamental form of the hyperbolic paraboloid (the surface $z=x^2-y^2$) to see if its metric is like the metric of the 'linear algebra hyperbolic geometry', but its coefficients form a metric with signature $(+,+)$ which would suggest that its geometry is... euclidean? But that cannot be... and I'm not able to find clear information about this.
Can anyone tell me the connections and differences between these two concepts? Why are both $\mathbb{R}^2$ with a metric with signature $(+,-)$ and a saddle (which we can embed in the 3-dimensional euclidean space) both examples of hyperbolic geometry?
Solution 1:
I'll try to answer in three parts. I'll first describe what you "incorrectly" called the hyperbolic plane, then describe what people usually call the hyperbolic plane, and then explain what are the relations between these spaces. I add a fourth bonus part which is more advanced, and deals with embedding of hyperbolic geometry in Euclidean space. If you don't want to read all the details, please go to the conclusions at the end.
The 2d Minkowski space $\mathbb{R}^{1,1}$
Consider first $\mathbb{R}^2$ with a $(-,+)$ signature "metric". To make it clear, I'll call this space Minkowski (because of its use in special relativity) and denote it by $\mathbb{R}^{1,1}$. The first thing to know is that this is usually not called a metric, since it is not positive definite -- one can talk of pseudo-metric. For definiteness, let's take coordinates $(x,y)$ on $\mathbb{R}^2$ and write the metric as $$g_{\mathbb{R}^{1,1}} = -\mathrm{d}x^2 + \mathrm{d}y^2 \, .$$ On that space, let's look at the set of points $(x,y)$ that are at a "distance" $d$ of the origin $(0,0)$. By definition, this is a hyperbole if $d \neq 0$, and if $d=0$ this is the intersection of the two lines with equation $x = \pm y$, which are the asymptotes to the hyperboles.
Because what plays the role of circles in standard Euclidean geometry (the set of points at a distance $d$ of a fixed points) is now hyperboles, you can say that this geometry has a "hyperbolic flavor."
However, it is not what people usually call the hyperbolic plane! In particular, this space is flat (it has 0 curvature), the sum of the angles of a triangle is always $\pi$, and it satisfies Euclide's axiom of parallels. Now, let's look at the hyperbolic plane.
The hyperbolic plane $\mathbb{H}$
The hyperbolic plane can be described as the set $\mathbb{H}:=\mathbb{R} \times \mathbb{R}_{>0}$ parametrized by $(x,y)$ with $y>0$ and with metric $$g_{\mathbb{H}} = \frac{\mathrm{d}x^2 + \mathrm{d}y^2 }{y^2} \, . $$ This is a perfectly well-defined Riemannian manifold, with positive definite metric.
If you compute the curvature of this space, you will find that it is constant and negative. In details, you can compute the Levi-Civita connection, the Riemann tensor, and obtain the scalar curvature -- or, more simply, since we are in two dimensions, you can compute the Gauss curvature. In any case, you will find that the scalar curvature is independent of $x$ and $y$, and is $R=-2$ everywhere (the Gauss curvature is then $R/2=-1$).
So the hyperbolic plane is a Riemannian space of constant negative curvature, but the metric is everywhere positive definite. It is the constant negative curvature that give to the space its hyperbolic aspects. In particular, that's why the sum of the angles of a triangle is less than $\pi$ -- see the Gauss-Bonnet formula. This is also what is responsible for the tendency that lines have to "diverge" : the parallel postulate is violated in the following way. In Euclidean geometry, through a point exterior to a line there passes exactly one parallel line. In hyperbolic geometry, through a point exterior to a line there passes more than one parallel line.
Now in the rest of this answer, I'll try to make the connection between the hyperbolic spaces (=with constant negative curvature but perfectly positive definite metric) and Minkowski spaces (flat spaces with non positive definite metric).
You probably have heard that there exist various "models" of the hyperbolic plane. These are simply other Riemannian spaces that are isomorphic to $\mathbb{H}$ as Riemann surfaces. For instance, there is a version of the hyperbolic plane that has the shape of a disk, called the Poincaré disk. To see that, define the complex coordinate $z=x+iy$, and define the new complex coordinate $u$ by the relation $$iu = \frac{1+iz}{1-iz} \qquad \Leftrightarrow \qquad iz = \frac{-1+iu}{1+iu} \, . $$ It is easy to check that this establishes a bijection between $\mathbb{H}$ parametrized by $z$ and the Poincaré disk $$\mathbb{D} = \{ u \in \mathbb{C} \mid |u|<1 \} \, . $$ The metric on the hyperbolic plane and the Poincaré disk in complex coordinates are \begin{equation} \label{met1} g_{\mathbb{H}} = \frac{\mathrm{d} z \mathrm{d} \bar{z}}{(\mathrm{Im} \, z)^2} = \frac{4 \mathrm{d} u \mathrm{d} \bar{u}}{(1-|u|^2)^2} \, . \end{equation} One can check that the Ricci scalar is again constant and equal to $R=-2$ (obviously, this can be computed in any model!).
Embedding in Minkowski space
Now comes the tricky part : I will give you a third model of the hyperbolic plane $\mathbb{H}$, this time as a subvariety of a Minkowski space $\mathbb{R}^{1,2}$ with metric of signature $(-,+,+)$. More precisely, consider the upper sheet of a hyperboloid in $\mathbb{R}^{1,2}$. The metric on this space is $g_{\mathbb{R}^{1,2}} = -\mathrm{d} X_0^2 + \mathrm{d} X_1^2 + \mathrm{d} X_2^2$, and the hyperboloid sheet is defined by the equation $$X_0^2 - X_1^2 - X_2^2 = 1 \, , \qquad X_0>0 \, . $$ We can parametrize this by two angles $\alpha$ and $\beta$: \begin{eqnarray*} X_0 &=& \cosh \alpha \\ X_1 &=& \sinh \alpha \cos \beta \\ X_2 &=& \sinh \alpha \sin \beta \end{eqnarray*} Using these coordinates, we find that the metric on the sheet is $$ g_{\mathbb{H}} = \mathrm{d} \alpha ^2 + (\sinh \alpha)^2 \mathrm{d} \beta^2 \, , $$ and again we can compute the Ricci scalar and find $R=-2$. The relation between this model and the Poincaré disk model is given by a stereographic projection. More precisely, the Poincaré disk is the stereographic projection of the hyperboloid sheet on the plane $X_0=0$ with respect to the point $(X_0,X_1,X_2)=(-1,0,0)$. (image from Wikipedia).

Let us work out the details: a point $(X_0,X_1,X_2)$ on the hyperboloid sheet is mapped by this projection to the point $$ \left( 0 , \frac{X_1}{1+X_0} , \frac{X_2}{1+X_0} \right) \, . $$ Using that, we obtain the relation between the coordinate on the disk $u$ and the coordinates $\alpha$ and $\beta$ on the hyperboloid, $$u = \frac{\sinh \alpha}{1+\cosh \alpha} e^{i \beta} \, . $$ You can check that the two expressions for $g_{\mathbb{H}}$ given above are indeed the same.
Embedding in Euclidean space $\mathbb{R}^3$ ?
[TL;DR : there is no "satisfactory" embedding in $\mathbb{R}^3$ with metric $(+,+,+)$. ]
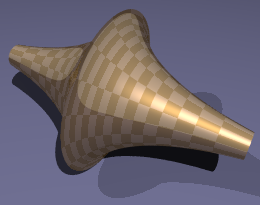
We have just seen that it is possible to embed isometrically the full hyperbolic plane into Minkowski space. Is it possible to do the same in Euclidean space? By this, I mean to find a (regular) map $f : \mathbb{H} \longrightarrow \mathbb{R}^3$ such that the metric induced on the image of $f$ by the Euclidean metric $g_{\mathbb{R}^3} = \mathrm{d} X_0^2 + \mathrm{d} X_1^2 + \mathrm{d} X_2^2$ be, possibly up to a change of coordinates, the metric $g_{\mathbb{H}}$ considered in the previous paragraphs. We will see in a minute that the answer is no. In fact, the hyperbolic plane is simply "too big" for $\mathbb{R}^3$. However, if we pick a constant $c>0$ and remove the part of $\mathbb{H}$ that satisfies $y < c$, then a solution is available. Because of a problem of universal covering, we also have to take a part of $\mathbb{H}$ of width $2 \pi c$ in the $x$ direction, for instance $0 \leq x < 2 \pi c$. Then, define $t=\mathrm{ArcCosh} \frac{y}{c}$ and \begin{eqnarray*} X_0 &=& t - \tanh t \\ X_1 &=& \mathrm{sech} \, t \cos \frac{x}{c}\\ X_2 &=& \mathrm{sech} \, t \sin \frac{x}{c} \end{eqnarray*} A cumbersome computation shows that the metric induced on that surface is indeed $g_{\mathbb{H}}$. This surface is called a (half) pseudosphere. Here is a picture (taken from wikipedia)
So, as we see, it is possible to embed part of the hyperbolic plane in Euclidean $\mathbb{R}^3$. But if you want to embed all of it, this is simply not possible, by a theorem of Hilbert that says that there exists no complete regular surface of constante negative (Gaussian) curvature immersed in $\mathbb{R}^3$. However, for the curvature to be defined, you need to be able to differentiate at least twice on the manifold - this is hidden in the word "regular". To be more precise, a theorem of Efimov tells you that there is no $C^2$ embedding of a complete surface in $\mathbb{R}^3$ with curvature satisfying $K<-\epsilon$ for some strictly positive constant $\epsilon$. But if you're satisfied with a $C^1$ embedding, then the Nash-Kuiper theorem tells you that a $C^1$ isometric embedding of the full hyperbolic plane in Euclidean $\mathbb{R}^3$ does exist! And things become even more counter-intuitive when you know that this embedding can be put inside a ball of arbitrarily small size...
Conclusion
Let me conclude this long post by a bunch of punch lines to remember :
- Hyperbolic geometry usually refers to negative curvature.
- The Hyperbolic plane is a 2d surface with constant negative curvature and positive definite metric.
- Whoever told you that the space with pseudo-metric with signature $(-,+)$ was "the hyperbolic plane" was very misleading. It is a space with 0 curvature where the points at fixed distance from a given point are hyperbolas.
- The hyperbolic plane has a connection to spaces with non definite positive metrics in the respect that one can embed the full hyperbolic plane in such a space, and not in a satisfactory way in a 3d Euclidean space.